2.7 無線ネットワーク
無線リンクは有線リンクと共通の特徴を多く持つものの、いくつかの重要な点で異なる。ビット誤りが重大な問題となるのは有線リンクと同様である ── 無線リンクが使われる環境では予測できないノイズが発生しがちなので、ビット誤りはさらに大きな問題となる。また、フレーム化と転送の確実性保証の問題も同様に解決される必要がある。一方で、無線リンクがよく利用される小型携帯デバイス (携帯電話やセンサー) は限られた電力 (小さなバッテリー) しか持たない場合が多いので、有線リンクと異なり無線リンクでは消費電力が大きな問題となる。さらに、無線送信器から最大出力で無線を飛ばしていいわけではない ── 他のデバイスとの干渉を考慮する必要があり、通常はデバイスが発することのできる出力に周波数ごとの規制が存在する。
無線媒体は本質的に多元接続である。特定の受信機に向かってだけ無線を飛ばしたり、近くの送信器から送信された十分な出力を持つ無線を受信しないようにしたりするのは難しい。そのため、MAC (媒体アクセス制御) は無線リンクにおける中心的な話題となる。さらに、送信した信号を誰が受信するかを制御するのが難しいので、盗聴 (eavesdropping)の問題も解決する必要がある。
無線テクノロジには不可解なほど大量の品揃えが存在し、それぞれが様々な次元で異なる妥協案を採用している。テクノロジを分類する簡単な指標として、提供されるデータレートと通信を行うノード間の最大距離がある。それ以外の指標には電磁波スペクトルのどの部分を利用するか (加えて、その部分を使うのに免許が必要かどうか)、および消費される電力量がある。本節では二つの有名な無線テクノロジ Wi-Fi (正式には IEEE 802.11) と Bluetooth を議論する。次節では ISP が提供するアクセスサービスの文脈でセルラーネットワークを議論する。こういったテクノロジとその比較を表 4 に示す。
| Bluetooth | Wi-Fi | 4G セルラー | |
|---|---|---|---|
| 典型的なリンク長 | 10 m | 100 m | 数十キロ |
| 典型的なデータレート | 2 Mbps (共有) | 150-450 Mbps | 1–5 Mbps |
| 典型的な使用例 |
周辺機器とコンピューターの接続 |
コンピューターと有線基地局の接続 |
携帯電話と有線タワーの接続 |
| 似ている有線テクノロジ | USB | イーサネット | PON |
「帯域」という言葉が周波数帯の幅を表すこともあればリンクのデータレートを表すこともあると以前に説明した。無線ネットワークの議論では両方の概念が登場するので、これからは「帯域」を狭い意味 ── 周波数帯の幅 ── で用い、リンクを通して送信できる一秒あたりのビット数を指すときは (表 4 のように) 「データレート」を用いる。
2.7.1 基礎的な問題
全ての無線リンクは同じ媒体を共有するので、その媒体を効率良く、互いが過度に干渉せずに共有することが課題となる。この共有の大部分は、媒体を周波数と空間の次元で分割することで達成される。つまり、特定の地域における特定の周波数の独占的利用が企業などの単一の組織に割り振られる。電磁信号の届く領域を制限することは技術的に可能である: 電磁信号は発生源から離れると弱まる (減衰する) ので、届く領域を狭めたいときは送信器の出力を弱くすれば済む。
通常そういった電波の割り振りは政府機関によって行われ、アメリカでは FCC (Federal Communications Commission, 連邦通信委員会) と呼ばれる機関が担当する。バンド (周波数の範囲) は特定の用途ごとに割り振られ、政府用に割り振られるバンドや、AM ラジオ、FM ラジオ、テレビ、衛星通信、携帯電話といった用途に割り振られるバンドが存在する。そして個別の組織にはそういったバンド内の特定の周波数を特定の地域で利用する免許が与えられる。最後に、いくつかのバンドは免許不要 (license-exempt) と定められており、免許が無くても使用してよいことになっている。
誰でも好き放題できるなら免許不要の周波数の共有は不可能なので、免許不要の周波数を利用するデバイスに対しても一定の規制は存在する。最も重要な規制は送信出力の制限である。この規制によって信号の範囲が制限され、他の信号との干渉が起こりにくくなる。例えばコードレス電話 (広く利用される免許不要デバイス) の信号は 30 メートル程度の範囲にしか届かない。
多くのデバイスとアプリケーションがバンドを共有する状況ではスペクトラム拡散 (spread spectrum) という考え方がよく登場する。スペクトラム拡散とは、他のデバイスからの干渉を最小化するために信号を広いバンドに広げる考え方を言う (元々スペクトラム拡散は軍用に考案されたので、「他のデバイス」は信号を妨害している場合が多い)。例えば周波数ホッピング (frequency hopping) は周波数をランダムに切り替えながら信号を転送するスペクトラム拡散のテクニックである。最初に特定の周波数で信号を転送し、しばらくしたら異なる周波数、またしばらくしたらさらに異なる周波数と次々に切り替えていく。転送に使われる周波数は完全にランダムではなく、疑似乱数発生器でアルゴリズム的に計算したものを利用する。受信側は送信側と同じアルゴリズムを同じシードで初期化するので、送信側と同じように周波数を切り替えて正しくフレームを受信できる。この手法は二つの信号が同じ周波数を使う可能性を低くすることで干渉を減少させる。
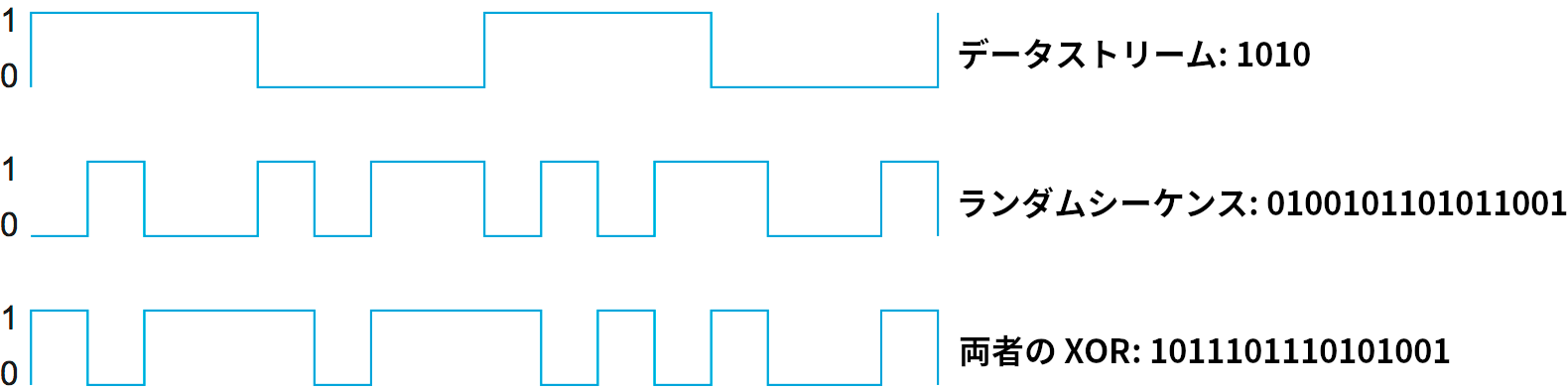
直接シーケンス (direct sequence) と呼ばれるスペクトラム拡散の二つ目のテクニックは干渉への耐性を高めるために冗長性を追加する。直接シーケンスではデータの各ビットを転送される信号における複数のビットで表すことで、転送されたビットの一部が干渉で反転したとしても元のビットを回復できるだけの冗長性を持たせる。送信側が送信しようとする各ビットに対して、その値とチッピングシーケンス (chipping sequence)と呼ばれるランダムな \(n\) ビットの列の XOR が送信される。周波数ホッピングと同様に、このランダムなチッピングシーケンスは送信側と受信側の双方が知っている疑似乱数生成器が生成する。直接シーケンスによって信号は普通に転送するよりも広い周波数帯に拡散する。図 43 に 4 ビットのチッピングシーケンスを使った例を示す。
電磁スペクトルの異なる領域は異なる性質を持つので、通信に向いている領域もあればそうでない領域もある。例えば建物を貫通できるかどうかは周波数によって異なる。政府は電波という通信で最も重要な領域だけを規制する。この領域への需要は高まっているので、デジタルテレビの普及によってアナログテレビが段階的に廃止されることで利用可能になる領域に大きな注目が集まっている。
現代の無線ネットワークを観察すると、二種類のエンドポイントが存在するのが分かる。一つは基地局 (base station) と呼ばれるもので、移動はできないものの、インターネットなどのネットワークへの有線接続 (あるいは少なくともデータレートの高い接続) を持つ。この様子を図 44 に示す。基地局に接続するノード (図中の「クライアントノード」) は移動できる場合が多く、他のノードとの通信を基地局とのリンクに完全に依存している。
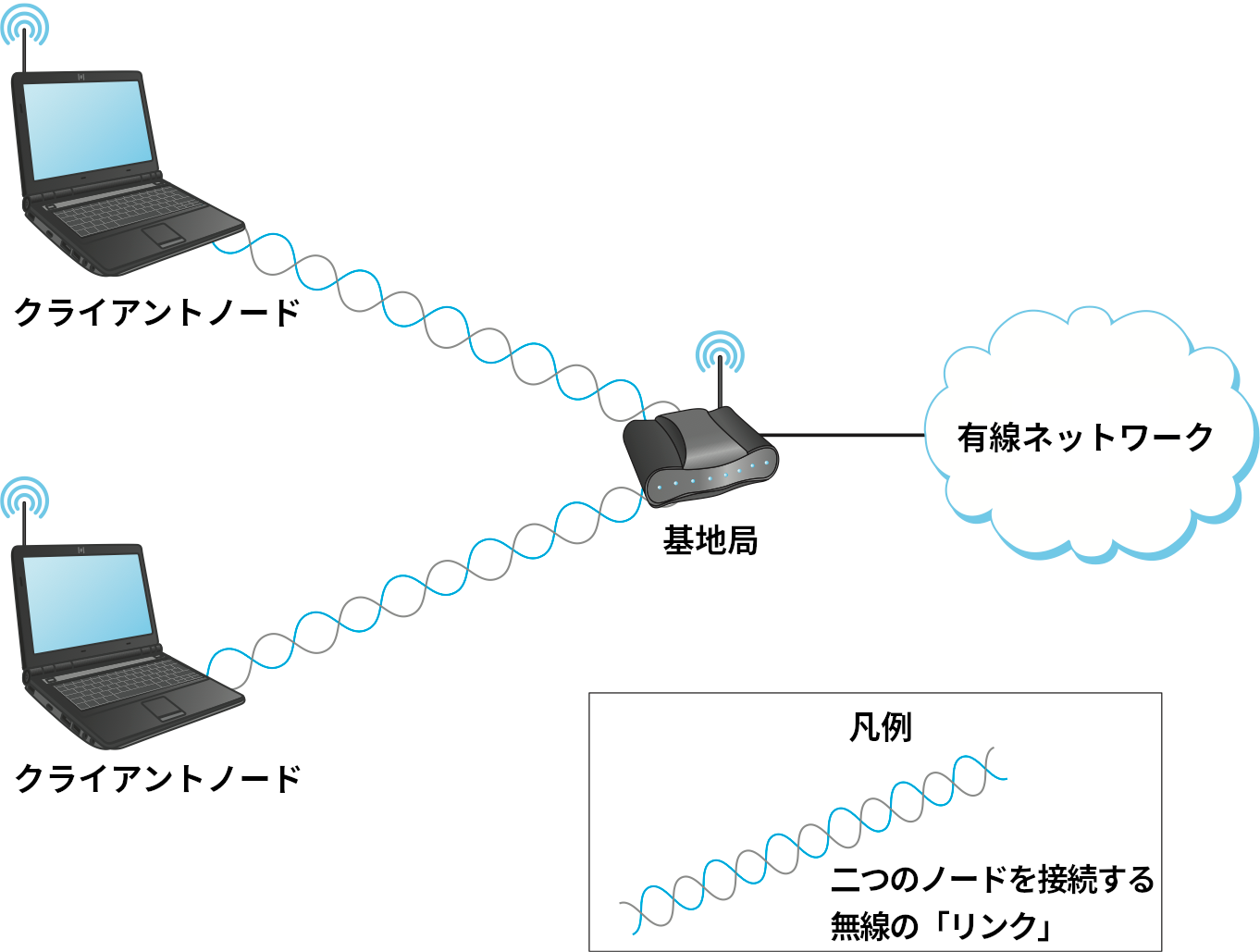
図 44 では二つのデバイス (基地局とクライアントノード) をつなぐ無線の「リンク」が波打つ二重の線に抽象化されて表されている点に注目してほしい。無線通信の興味深い特徴の一つに、一対多通信が自然にサポートされることがある。これは一つのデバイスが発した電波であっても他の複数の機器が同時に受信できるためである。しかし、図 44 のようにポイントツーポイントリンクとして抽象化する方が上位のプロトコルにとって便利な場合が多い。本節でも無線通信によるポイントツーポイントリンクがどのように動作するかを見る。
さらに図 44 において、基地でない (クライアント) ノード同士の通信が基地局を通る迂回した経路で行われる点にも注目してほしい。クライアントノードが発した電波は他のクライアントノードでも受信できるにもかかわらず、である ── よく見られる基地局モデルではクライアントノード同士の直接の通信が行えない。
このトポロジーからは三種類の定性的に異なるモビリティ (移動性) のレベルが示唆される。一つ目のレベルにはモビリティが全く存在しない。基地局から指向性を持って送信された信号を受信するために受信側が特定の位置に固定されなければならない状況がこれに相当する。二つ目のレベルは一つの基地局がカバーする範囲におけるモビリティであり、Bluetooth がこれに相当する。三つ目のレベルは複数の基地局によって提供されるモビリティであり、携帯電話と Wi-Fi がこれに相当する。
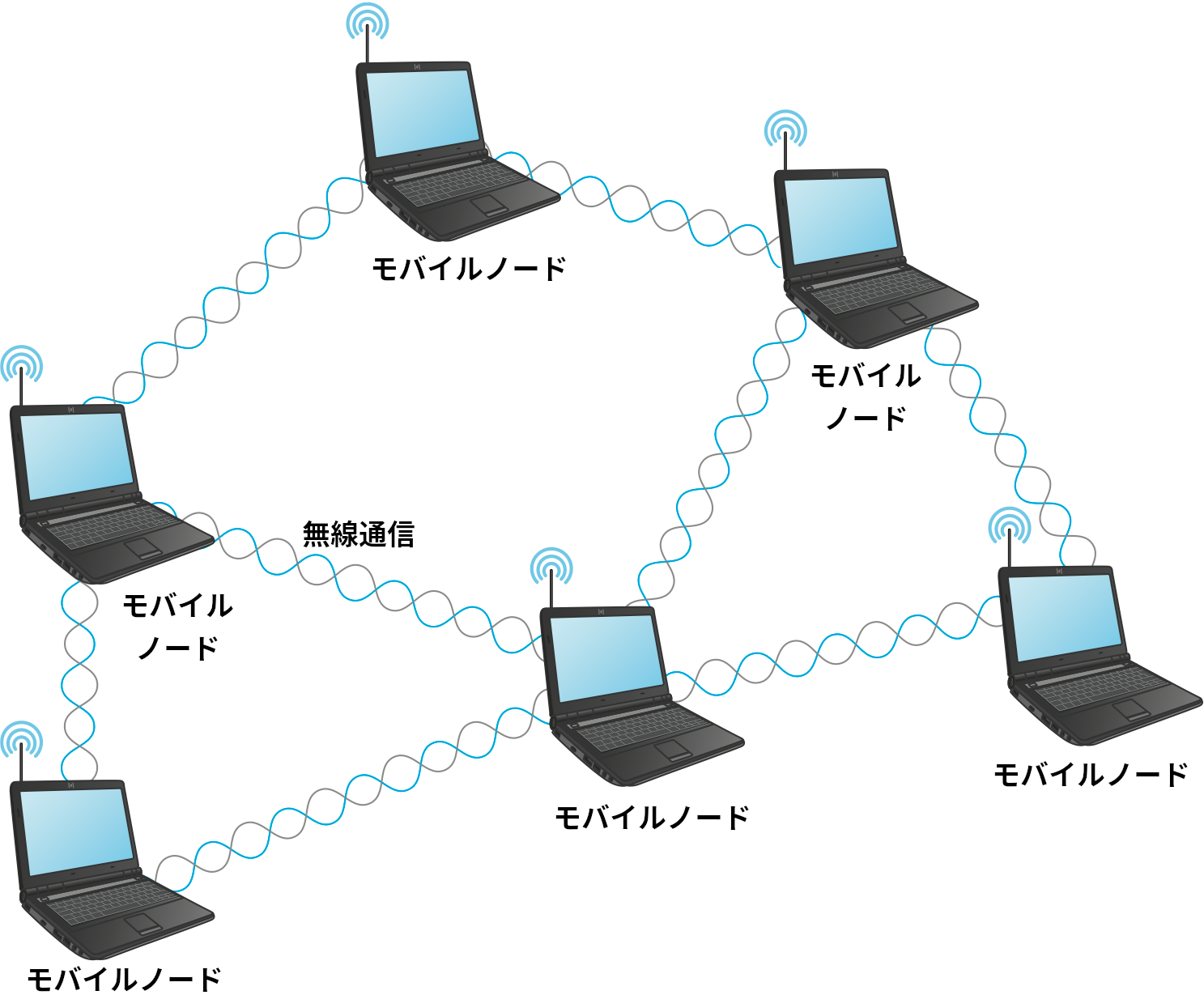
ここまでに説明したものとは異なるメッシュネットワーク (mesh network) と呼ばれるトポロジーに近年関心が高まっている。メッシュネットワークはアドホックネットワーク (ad hoc network) とも呼ばれる。メッシュネットワークではノードがピアとなる: 特別な基地局ノードは存在しない。また、メッセージはノードがカバーする範囲にある他のノードをたどって何度でも転送できる。テクノロジの競争という視点から見ると、これによって狭い範囲しかカバーできないテクノロジで大きな範囲をカバーできるようになり、広範囲をカバーできるテクノロジと競争できる可能性が生まれる。さらに、メッシュネットワークでは任意の二つのノードをつなぐルートが複数存在するので、障害耐性も提供される。加えて、段階的な (少しずつコストを投入しながらの) 拡張も行える。一方で、メッシュネットワークでは基地局でないノードがそれなりに高度なハードウェアとソフトウェアを必要とするので、一台ごとのコストと消費電力は増加する可能性が高い。これらはバッテリー駆動のデバイスにおける重大な懸案事項である。無線メッシュネットワークは研究者の大きな関心を集めているものの、基地局を使ったネットワークと比べれば依然として生まれたばかりと言える。無線メッシュを作るときは無線センサーネットワークと呼ばれるもう一つの新興テクノロジが使われることが多い。
無線ネットワークに共通する問題がこれで説明できたので、次は二つの有名な無線テクノロジを詳しく見ていこう。
2.7.2 Wi-Fi (IEEE 802.11)
多くの読者は IEEE 802.11 規格 (通称 Wi-Fi) に基づいた無線ネットワークを利用したことがあるだろう。正確に言うと「Wi-Fi」は商標であり、IEEE 802.11 への準拠認定を行う業界団体 Wi-Fi Alliance によって保有される。イーサネットと同様、IEEE 802.11 は限られた地理的領域 (家、オフィス、キャンパスなど) での利用のために設計されており、共用の通信媒体に対するアクセス調停が主要な課題となる ── IEEE 802.11 における通信媒体とは無線信号が伝播する空間である。なお本項ではこれ以降、IEEE 802.11 を単に「802.11」と表記する (802.11 のバリエーションも同様)。
物理的な特徴
802.11 はいくつかの物理層を定義している。それぞれの物理層は異なる周波数帯で動作し、様々なデータレートを提供する。
オリジナルの 802.11 規格は電波ベースの物理層に関する規格を二つ定義した。一つはスペクトラム拡散に 1 MHz 幅の周波数帯を 79 個用いる周波数ホッピングを利用し、もう一つは 11 ビットのチッピングシーケンスを用いる直接シーケンスを利用する。両方の規格は最大 2 Mbps のデータレートを提供した。その後に追加された規格 802.11b は直接シーケンスの一種を採用し、最大 11 Mbps をサポートした。これらの三つの規格は 2.4 GHz という電磁スペクトルの中で免許が不要な周波数帯で動作する。その次の 802.11a は周波数分割多重化の一種である OFDM (Orthogonal Frequency Division Multiplexing, 直交周波数分割多重化) を採用し、最大 54 Mbps をサポートした。802.11a は免許不要の 5 GHz 帯で動作する。続いて登場した 802.11g は OFDM を採用し、最大データレートは 54 Mbps だった。802.11g は 802.11b と後方互換性を持つ(加えて 2.4 GHz 帯にも対応する)。
執筆時点において、多くのデバイスは 802.11n または 802.11ac をサポートする。これらの規格は典型的にはデバイスごとに 150 Mbps から 450 Mbps 程度のデータレートを達成する。この改善には複数のアンテナが使えるようになったこと、および利用できる無線チャンネル帯域が増えたことが関係している。複数のアンテナの利用は MIMO (multiple-input, multiple-output, 多入力多出力) と呼ばれることが多い。現在策定されている最新の規格 802.11ax では、セルラーネットワークの 4G/5G で利用される符号化と変調のテクニックを採用することでスループットがさらに大きく改善されると見込まれている。4G と 5G は次節で解説する。
商用製品は 802.11 の複数の規格をサポートすることがよくある。五つの規格 (a, b, g, n, ac) を全てサポートする基地局も多い。こうすることで一部の規格しかサポートしないデバイスとの互換性が確保されるだけではなく、同種の基地局同士の通信で利用する帯域を環境に応じて最も速度が出るものに切り替えることも可能になる。
全ての 802.11 規格はサポートされる最大ビットレートを定義するものの、多くはそれより低いビットレートもサポートする事実は指摘に値する。例えば 802.11a ではビットレートを 6, 9, 12, 18, 24, 36, 48, 54 Mbps のいずれかとした動作に対応する。ビットレートを低くすると、ノイズの存在下で転送された信号の復号が簡単になる。また、ビットレートを変えると変調方式も変更される。加えて、誤り訂正符号の形で信号に追加される冗長な情報量も変化する。冗長な情報が増えると同じデータを伝えるビットが多く転送されるので実効データレートは減少するものの、その代わりビット誤りに対する耐性が増加する。
システムは自身が置かれたノイズ環境に応じて最適なビットレートを選択しようとする。ビットレートを選択するアルゴリズムは非常に複雑になる場合がある。興味深いことに、802.11 規格は特定のアプローチを指定しておらず、ビットレートを選択するアルゴリズムはベンダーに任されている。ビットレートの選択における基本的なアプローチは、物理層における SN 比 (signal-to-noise ratio) を直接測定するか、パケットが正しく転送・確認通知される確率から SN 比を推定することでビット誤りの頻度を推定するというものである。高いビットレートが使えないかどうかを確認するために、送信側がたまに高いビットレートでパケットを送信して成功するかどうかを調べるアプローチもある。
衝突回避
一見すると、イーサネットと同じ衝突回避アルゴリズム ── リンクがアイドルになるまで待ってから転送し、衝突したらバックオフする ── が無線プロトコルでも利用できると思うかもしれない。非常に大まかに見れば、802.11 でも同じアルゴリズムが使われる。しかしイーサネットでは全てのノードが自身以外からのメッセージを全て受信でき、送信と受信を同時に行えるのに対して、無線ではどちらの条件も成り立たない。そのため事態は複雑になり、衝突検出アルゴリズムはかなり複雑になる。無線ノードが (同じ周波数で) 送信と受信を同時に行えないことが多い理由は、送信器から伝わる信号の強度が通信相手から伝わる信号の強度よりずっと大きいために受信回路が圧倒されてしまうためである。ノードが同じネットワークに属する他のノードからの信号を受信できない可能性がある理由は、他のノードが遠くにあったり、障害物が途中にあったりするためである。以降の議論で説明するように、この状況は見かけより多少複雑になる。
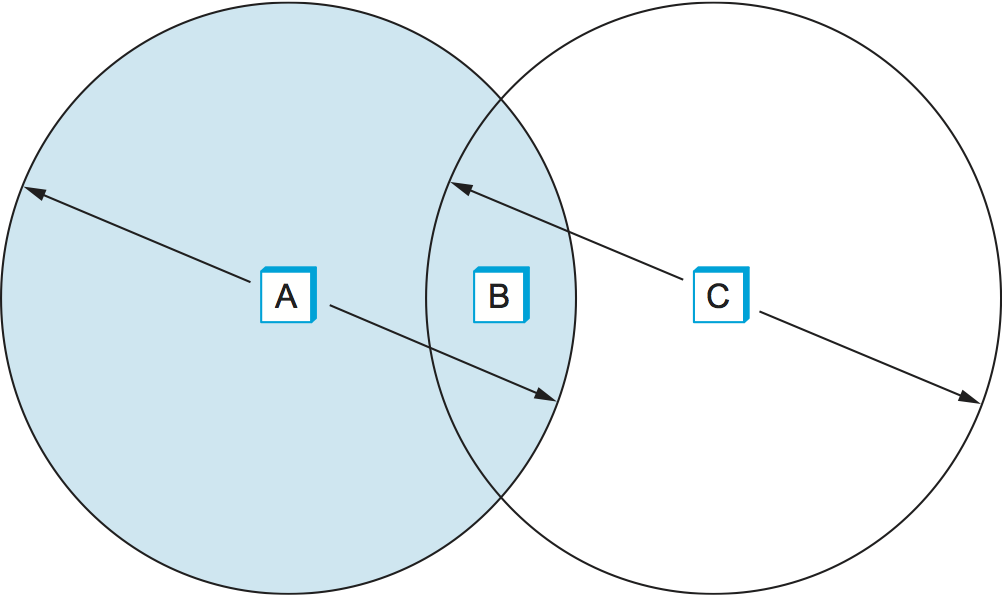
図 46 の状況を考えよう。A と C はどちらも B のカバーする領域に入っているものの、お互いの信号は相手に届かない。A と C の両者が B と通信しようと思ったとする。何の工夫も無ければ、A と C は互いに相手の信号を受信できないために相手の存在に気が付かないので、両者はフレームを送信する。A と C が送ったフレームは B で衝突を起こすものの、イーサネットと異なり、A と C はこの衝突を知ることができない。このように衝突が起こっても検知できない関係にあるノードを、お互いの隠れ端末 (hidden node) と言う。
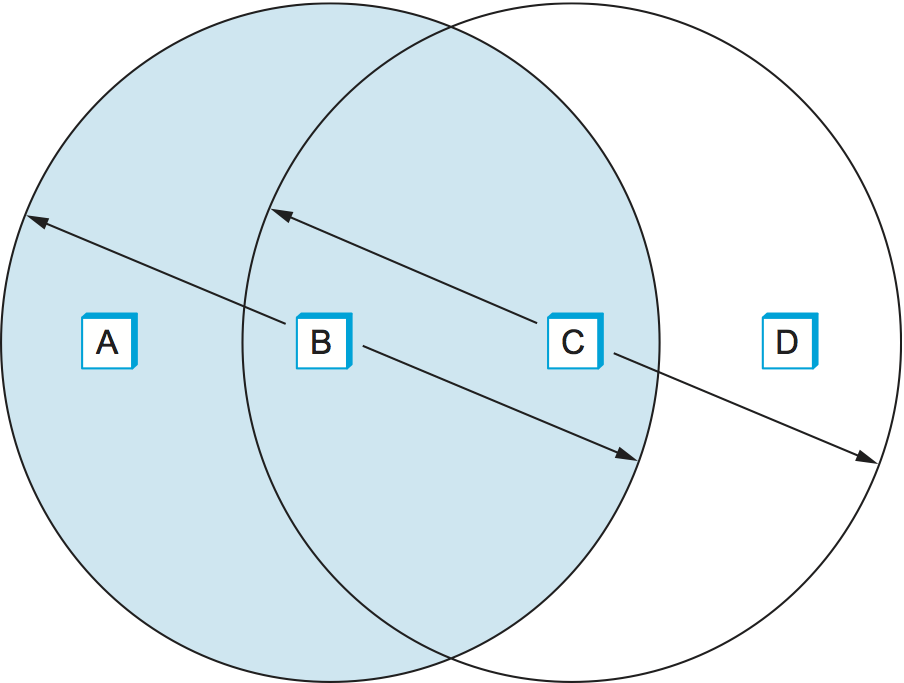
隠れ端末問題に関連する問題として、図 47 のような状況で発生するさらし端末問題 (exposed node problem) がある。4 つのノード A, B, C, D が一直線に並んでおり、信号は隣り合うノードにしか届かない。例えば B は A および C とフレームを交換できるものの、B の信号は D に届かない。また C の信号は B と D に届くものの、A には届かない。B が A にフレームを送信したとしよう。このとき C は B の信号を受信できるので、B がフレームを送信したことを検出できる。しかし、B の送信を検出したことをもって C は誰にもフレームを送信できないと結論付けるのは間違いである。例えば C が D にフレームを送信したとしても、A が受信する B からの信号で干渉は発生しない (A が B にフレームを送信していたとしたら干渉が起こるものの、この例で B は送信を行っている)。
802.11 において、この問題は Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) を使って解決される。「CA」は衝突回避 (collision avoidance) を表す。これに対してイーサネットで使われる CSMA/CD の「CD」は衝突検出 (collision detection) だった。CSMA/CA を動作させるのに必要な要素がいくつかある。
搬送波検出 (CA) は簡単に思える: 送信側がパケットを送信する前に、他のノードから送信された信号を受信しているかどうかをチェックして、受信していないときにだけ送信すればいい。しかし隠れ端末問題があるので、送信側で信号を受信していない事実だけでは受信側で衝突が起きないことを保証するのに十分でない。このため、CSMA/CA では受信側から送信側への明示的な ACK が必要になる。パケットが受信側で正しく復号され CRC のチェックも通過したなら、受信側は ACK を送信側に送り返す必要がある。
衝突が起こるとパケット全体が役立たずになることに注目してほしい。このため、802.11 には隠れ端末問題を部分的に解決するための RTS-CTS (Ready to Send-Clear to Send) と呼ばれる省略可能な仕組みが存在する。送信側はパケットを送ろうと思っている受信側に向かって RTS (短いパケット) を送信し、そのパケットを受信側が正しく受信できた場合は CTS と呼ばれる別の短いパケットで応答する。隠れ端末はおそらく RTS を受信しないものの、CTS はほぼ間違いなく受信する。このため、CTS は受信側の領域内に存在するノードに向かって「しばらく何も送信するな」と言っているのに事実上等しい ── これから行われる転送にかかる時間は RTS パケットと CTS パケットに含まれる。その時間に小さなインターバルを加えた時間が過ぎると搬送波はまた利用可能になったとみなされ、他のノードは送信を行えるようになる。
もちろん、二つのノードが同時にアイドルなリンクを検出し、RTS フレームを同じ時刻に送信することがあるかもしれない。このとき RTS フレームは衝突する。送信側は一定の時間内に CTS フレームが受信できないと衝突したと判断し、ランダムな時間だけ待機してから再度送信を試みる。ノードが送信を遅らせる時間は指数バックオフによってイーサネットと全く同じように定義される。
RTS-CTS の交換が成功すると、送信側は続いてデータパケットを送信し、全て上手く行けばそのパケットに対する ACK を受け取る。一定の時間が経過しても ACK が返ってこなければ、送信側はチャンネルの利用を (同様の RTS-CTS を使った方法で) もう一度リクエストする。ただし、その時点で他のノードがチャンネルへのアクセスを得ようとしている可能性は当然ある。
ディストリビューションシステム
ここまでの説明を聞くと、802.11 はメッシュ (アドホック) トポロジーを持つネットワークに適しているように思える。実際メッシュネットワーク用の 802.11s 規格の策定は完了に近づいている。しかし現時点では、802.11 ネットワークのほぼ全てが基地局を利用するトポロジーを利用している。
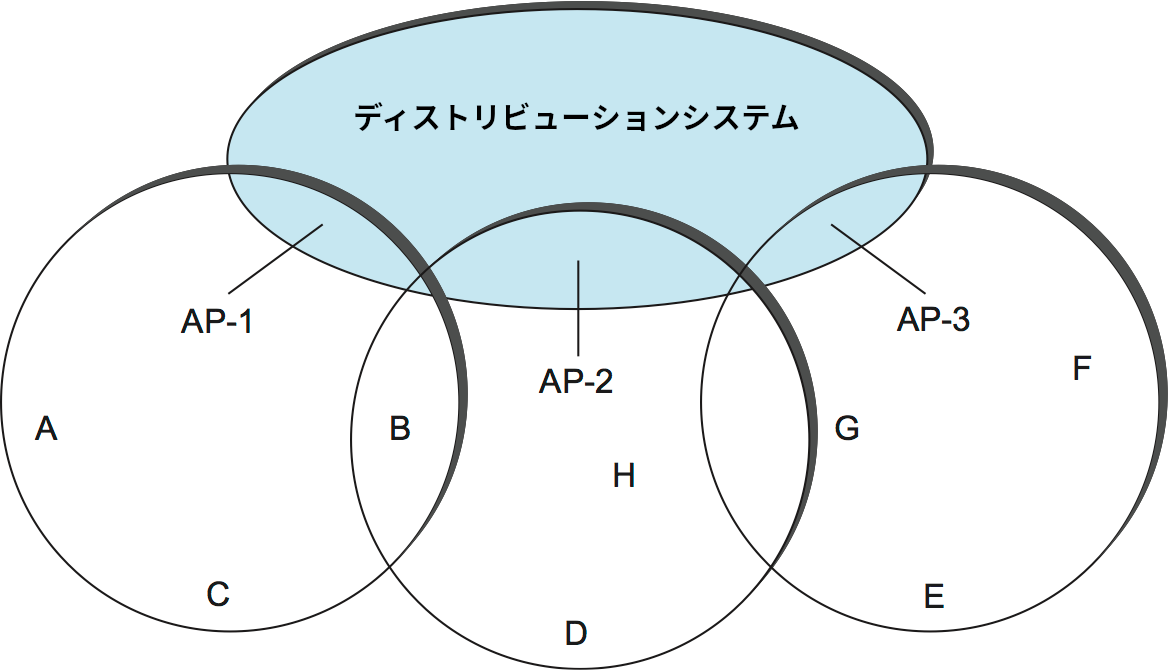
無線ネットワークでは全てのノードが平等な能力を持つわけではなく、ノート PC のように動き回れるノードもあれば有線のネットワークインフラに接続されているノードもある。802.11 では後者のような基地局はアクセスポイント (access point, AP) と呼ばれ、AP 同士はディストリビューションシステム (distribution system) によって互いに接続される。図 48 に三つのアクセスポイントをつなぐディストリビューションシステムを示す。それぞれの AP は自身の領域内のノードにサービスを提供し、そのときは適切な周波数帯のチャンネルが使われる。物理的に近い AP では異なるチャンネルが使われることが多い。
現在の議論ではディストリビューションシステムの詳細は重要でない ── 例えばイーサネットを使うことができる。唯一重要なのは、そのディストリビューションネットワークがリンク層で、つまり無線リンクと層の同じプロトコルで動作する点である。言い換えれば、ディストリビューションネットワークは上位層のプロトコル (例えばネットワーク層のプロトコル) に依存しない。
無線の信号が届く距離にある二つの無線ノードは互いに直接通信を行えるものの、図 48 の構成では各ノードがいずれかの AP と関連付けられ、ノード同士はお互いの AP を通して通信する。例えばノード A がノード E と通信するとき、A は最初にフレームを自身の AP (AP-1) に送信する。これを受けて AP-1 はディストリビューションシステムを通してフレームを AP-3 に転送し、AP-3 が最終的にフレームを E に転送する。AP-1 がメッセージを AP-3 に転送すべきだと知る方法は 802.11 の範囲外とされる: ブリッジに使われるプロトコルの利用が選択肢の一つとして考えられる。802.11 が規定するのはノードが自身の AP を選択する方法、およびさらに興味深いこととして、別のセル1へ移動するノードが存在する状況における AP の選択アルゴリズムの動作である。
AP を選択するアルゴリズムはスキャニング (scanning) と呼ばれ、次の四つのステップを持つ:
-
ノードはプローブ要求 (Probe Request) フレームを送信する。
-
プローブフレームを受信した全ての AP はプローブ応答 (Probe Response) フレームを返答する。
-
ノードはプローブ応答が返ってきた AP の中から一つを選択し、そこに向けてアソシエーション要求 (Association Request) フレームを送信する。
-
AP はアソシエーション返答 (Association Response) フレームで返答する。
スキャニングはネットワークに加わるノードおよび現在の AP に不満があるノードによって実行される。例えばノードが移動したために関連付いた AP からの信号が弱くなった場合に実行される。ノードが新しい AP との関連付けを構築すると、新しい AP はディストリビューションシステムを通じて古い AP にその変更を通知する (この通知はステップ 4 で起こる)。
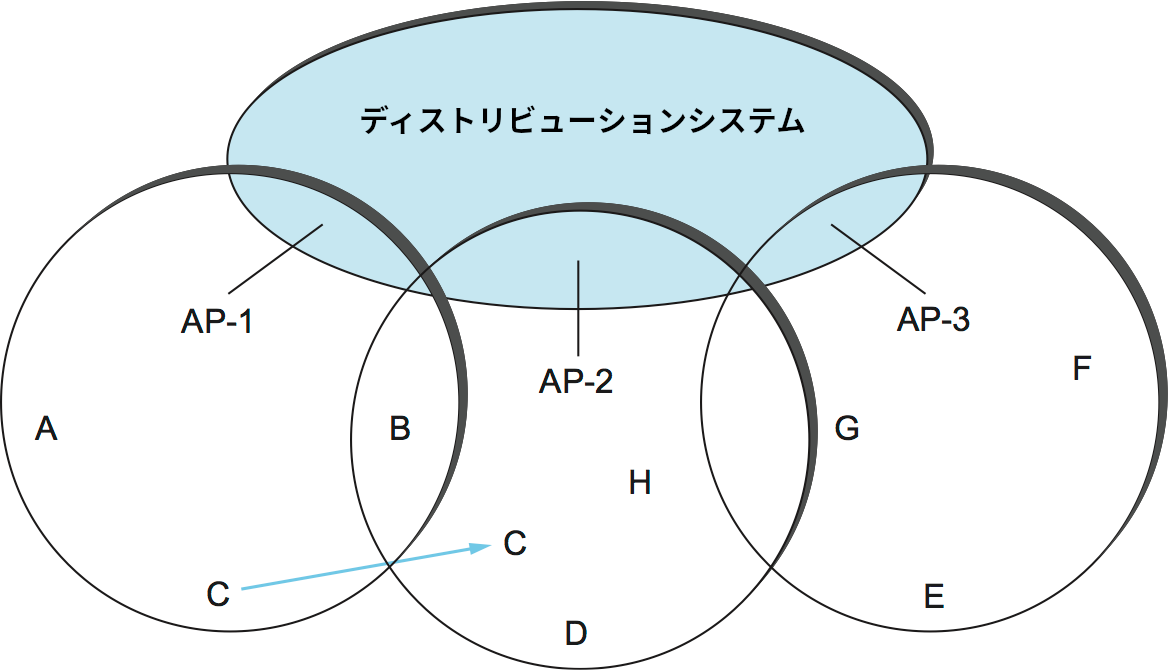
図 49 のような状況を考えよう。ノード C は AP-1 のセルから AP-2 のセルに移動しようとしている。C は移動しながらプローブ要求フレームを送信し、その後 AP-2 からのプローブ応答フレームを受け取る。どこかの時点で C は AP-1 より AP-2 を好むようになるので、C は自身と AP-2 のアソシエーションを行う。
ここまでに説明した仕組みはアクティブスキャニング (active scanning) と呼ばれる。ノードが自分からアクセスポイントを探索するためである。これ以外にも、AP は自身の能力を広報するためのビーコン (Beacon) フレームを送信する。このフレームには例えばサポートされる転送レートなどが含まれる。これはパッシブスキャニング (passive scanning) と呼ばれる仕組みであり、ビーコンフレームを受け取ったノードはアソシエーション要求フレームを送り返すだけで AP の変更が行える。
フレームフォーマット
図 50 に示す 802.11 のフレームフォーマットの大部分は想像通りの意味を持つ。フレームには送信元と宛先のノードアドレス (それぞれ 48 ビット)、最大 2312 バイトのデータ、そして 32 ビットの CRC が含まれる。Control フィールドは三つのサブフィールド (図には描かれていない) から構成される: フレームがデータなのか、RTS/CTS フレームなのか、スキャニングアルゴリズムで使われるフレームなのかを表す 6 ビットの Type フィールド、および各 1 ビットの ToDS フィールドと FromDS フィールド (意味は後述) である。

802.11 のフレームフォーマットに関する変わった点として、アドレスが二つではなく四つ含まれていることが挙げられる。これらのアドレスの解釈は、フレームの Control フィールドに含まれる ToDS ビットおよび FromDS ビットの設定によって変化する。フレームに複数のアドレスを持たせる必要があるのは、フレームがディストリビューションシステムを通じて転送される可能性があり、その場合は最初にフレームを送信したノードが現在のフレームの「送信元」と一致しないためである。宛先アドレスについても同じことが言える。
あるノードが別のノードに直接フレームを送信する最も単純なケースでは、ToDS と FromDS のビットは両方 0、Addr1 は宛先ノードのアドレス、Addr2 は送信元ノードのアドレスとなる。
最も複雑なケースでは ToDS と FromDS のビットは両方 1 となる。これはメッセージが無線ノードからディストリビューションシステムに届けられ、さらにディストリビューションシステムから他の無線ノードに届けられるケースに対応する。このとき Addr1 は最終的な宛先、Addr2 は最後の送信元 (最終的にディストリビューションシステムから宛先に向けてフレームを転送するアクセスポイント)、Addr3 は中間の宛先 (フレームを無線ノードから受け取り、ディストリビューションシステムを通じて転送するアクセスポイント)、Addr4 はオリジナルの送信元をそれぞれ識別する。例えば図 48 で A が E にフレームを送信するときは、Addr1 は E を、Addr2 は AP-3 を、Addr3 は AP-1 を、Addr4 は A をそれぞれ識別する。
無線リンクのセキュリティ
銅線や光ファイバーケーブルと比較したときに無線リンクが持つ明らかな問題の一つに、データがどこまで届くかが分からないことがある。宛先のノードが信号を受信したことは後から確認できるかもしれないが、その信号を他のノードが受信したかどうかは確かめようがない。そのため、データのプライバシーが懸案事項のとき無線ネットワークは課題をもたらす。
データのプライバシーを気にしない ── あるいは他の方法でプライバシーを保証する ── 場合であっても、関係ないユーザーがネットワークにデータを注ぎ込むのは避けたいはずである。そういったユーザーは少なくとも他人の資源を消費できてしまう (例えば家庭と ISP の間の限りある帯域が減る)。
こういった理由により、無線ネットワークはリンク自身および転送されるデータの両方に対するアクセス制御を行う何らかの仕組みを持つことが多い。こういった仕組みは無線セキュリティ (wireless security) に分類される。広く採用されている WPA3 (802.11i) は第 8.5 節で見る。
2.7.3 Bluetooth (IEEE 802.15.1)
Bluetooth は携帯電話、PDA (personal digital assistant)、ノート PC といったデバイスとその他の個人用デバイスや周辺機器をつなぐ非常に短距離の通信というニッチな領域で使われる規格である。例えば携帯電話にヘッドセットを接続したり、ノート PC にキーボードを接続したりするために Bluetooth は利用される。簡単に言えば、Bluetooth は二つのデバイスを接続する問題に対してケーブルでつなぐよりも便利な選択肢を提供する。こういったアプリケーションでは大きな電波領域や帯域は必要にならない。無線リンクの電波領域と帯域に最も大きく影響するのは転送出力なので、これは Bluetooth の送信出力を非常に小さくできることを意味する。この事実は Bluetooth を利用するデバイスにとっても好都合となる ── 多くは (例えばよくある電話のヘッドセットのように) バッテリー駆動であり、消費電力を抑えることが重要となる。
Bluetooth は 2.45 GHz という免許不要の周波数帯で動作し、典型的な Bluetooth リンクは 1–3 Mbps の帯域と 10 m の有効範囲を持つ。この事実に加えて、通信デバイスが単一の人物あるいはグループに属する場合が多いために、Bluetooth は PAN (personal area network) に分類されることがある。
Bluetooth は Bluetooth Special Interest Group と呼ばれる産業コンソーシアムによって規定される。この団体はプロトコルスイート全体を規定しており、リンク層のプロトコルだけではなく様々なアプリケーション向けのアプリケーションプロトコルも定義している。このアプリケーション向けプロトコルはプロファイル (profile) と呼ばれ、例えば PDA を PC と同期するためのプロファイルが存在する。他にも携帯コンピューターに 802.11 の方式で有線 LAN へのアクセスを提供するプロファイルが存在する (ただし、これは Bluetooth の初期目標ではなかった)。IEEE 802.15.1 規格は Bluetooth をベースとしているものの、アプリケーションプロトコルは除外されている。
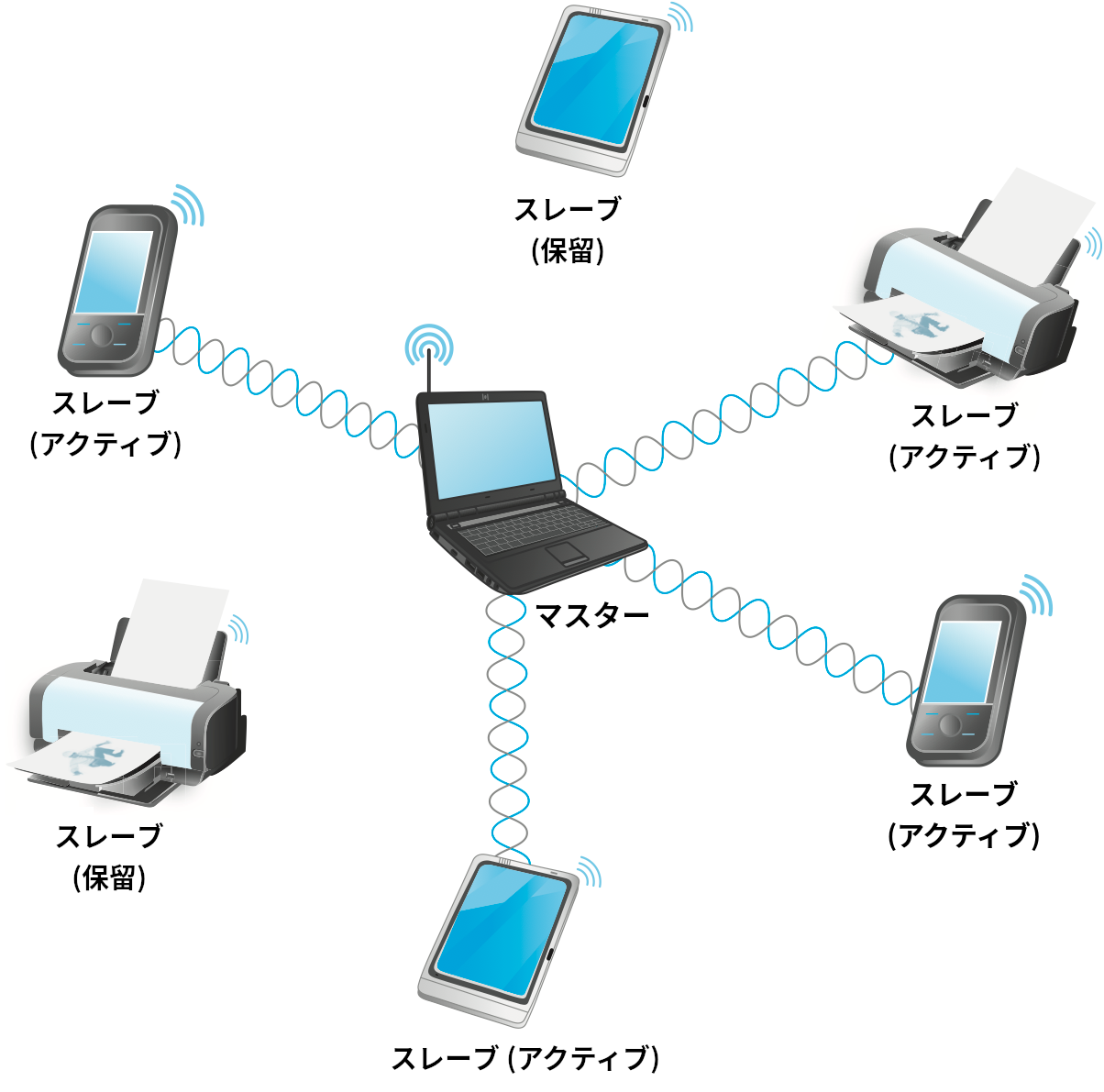
ピコネット (piconet) と呼ばれる Bluetooth の基本的なネットワークは、1 台のマスターデバイスと最大 7 台のスレーブデバイスから構成される (図 51)。全ての通信はマスターとスレーブの間で行われ、スレーブ同士は直接通信できない。スレーブは単純な役割しか持たないので、スレーブに搭載される Bluetooth ハードウェアとソフトウェアは単純かつ低価格にできる。
免許不要の周波数帯で動作する Bluetooth の電波は他の機器の電波と干渉する可能性があるので、スペクトラム拡散のテクニックが必要となる。Bluetooth では 79 個のチャンネル (周波数) を用意して 625 μs ごとに利用するチャンネルを切り替える周波数ホッピングが使われる。この方式により、同期的な時分割多重化を自然に行うためのタイムスロットが提供される。1 つのフレームは連続する 1, 3 もしくは 5 個のタイムスロットを使用する。フレームの転送を自発的に開始できるのはマスターだけで、マスターからの転送は必ず偶数のタイムスロットに開始される。スレーブは直前のタイムスロットでマスターから受信した要求への応答としてだけ転送を開始でき、そのため転送の開始は必ず奇数のタイムスロットとなる。この仕組みによりスレーブ同士の競合が発生しなくなる。
マスターはスレーブのデバイスを保留 (park) 状態にできる ── 保留状態のデバイスは自発的な動作を停止し、低消費電力モードになる。そのデバイスはピコネットで通信を行えず、マスターからの指示でのみ保留状態を解除する。ピコネットは最大 7 個のアクティブなスレーブデバイスに加えて最大で 255 個の保留状態のデバイスを保持できる。
消費電力が非常に小さい短距離通信の分野には Bluetooth 以外にもいくつかテクノロジが存在する。その一つが ZigBee であり、このテクノロジは CSA (Connectivity Standards Alliance, 旧称 ZigBee Alliance) によって考案され IEEE 802.15.4 として標準化された。帯域要件が緩く、消費電力を極端に低くしてバッテリーの寿命を極端に伸ばさなければならない状況のために ZigBee は設計されている。ZigBee は Bluetooth より単純で安価になるよう意図されており、センサーといった安価なデバイスで採用しやすい。近年、例えば建物内の温度、湿度、消費電力といった値を測定するために非常に安価なデバイスを大量に配備できるほどに技術は進歩したので、センサーは最近になって重要性が増しているネットワークデバイスのクラスである。
-
訳注: アクセスポイントの信号が届く範囲をセル (cell) と呼ぶ。 ↩︎